|
Ege Yuceel I'm a second-year Ph.D. student in the Reliable Autonomy Group at the University of Illinois Urbana-Champaign (UIUC), advised by Prof. Sayan Mitra. My research lies in robotics particularly fast and efficient motion planning algorithms and localization under limited information. Previously, I received my B.Sc. in Electrical and Electronics Engineering from Bilkent University, where I worked with Dr. Muhammed Ömer Sayın in the Games, AI, and Networks Research Lab on multi-agent learning and game theory. |

|
News
|
Selected Work |
|
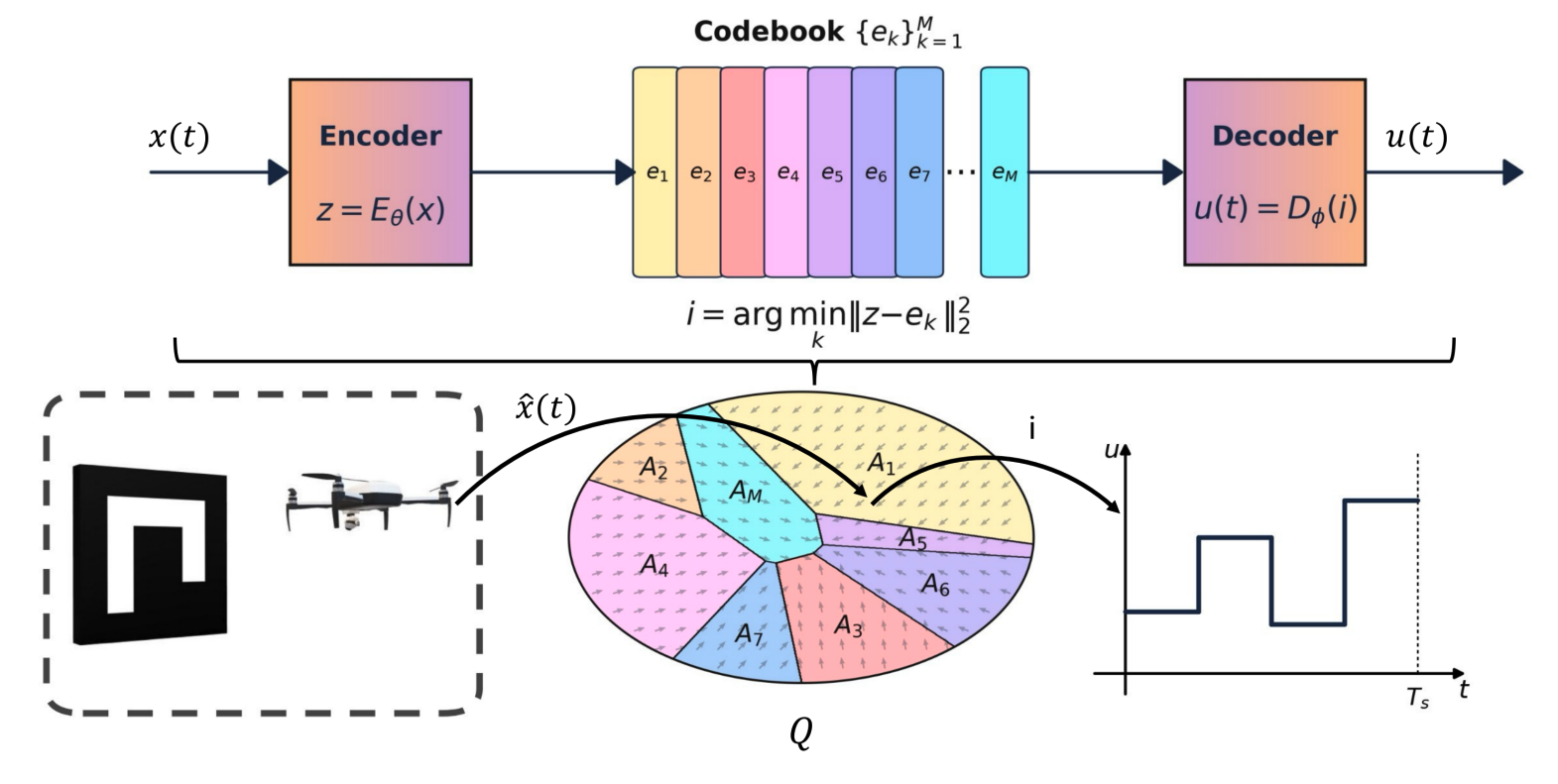
Minimal Information Control Invariance via Vector Quantization
Ege Yuceel, Teodor Tchalakov, Sayan Mitra IEEE Conference on Decision and Control (CDC), 2026 (To appear) paper Information-theoretic limits of synthesizing provably invariant controllers from coarsely quantized observations. A learned vector-quantization codebook maps the state to a finite set of control regions, certifying invariance and validated on a quadrotor. |
|
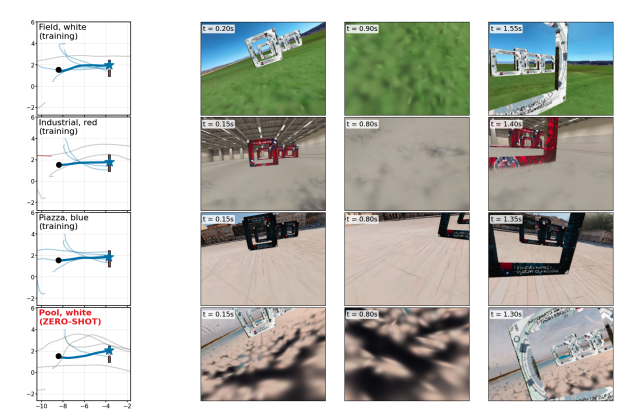
Factored Diffusion Policies: Compositionally Generalized Robot Control with a Single Score Network
Sayan Mitra, Ege Yuceel, Noah Giles, Abhishek Pai arXiv preprint, 2026 paper A single score network whose factored structure compositionally generalizes robot control to unseen task and environment combinations, including zero-shot transfer. |
|
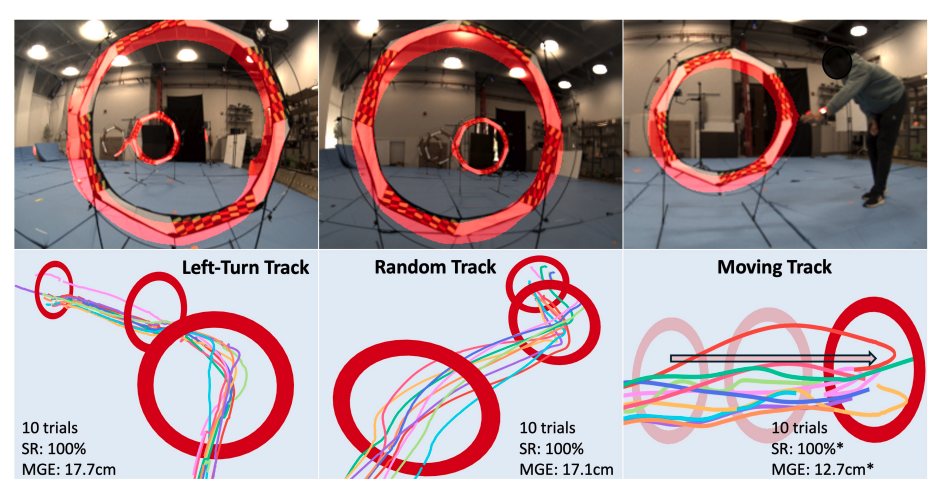
Performance-Guided Refinement for Visual Aerial Navigation using Editable Gaussian Splatting in FalconGym 2.0
Yan Miao, Ege Yuceel, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Sayan Mitra IEEE International Conference on Robotics and Automation (ICRA), 2026 paper Performance-guided refinement for visual aerial navigation: editable Gaussian splatting builds photorealistic scenes, enabling zero-shot vision-based flight through gates across diverse environments. |
|
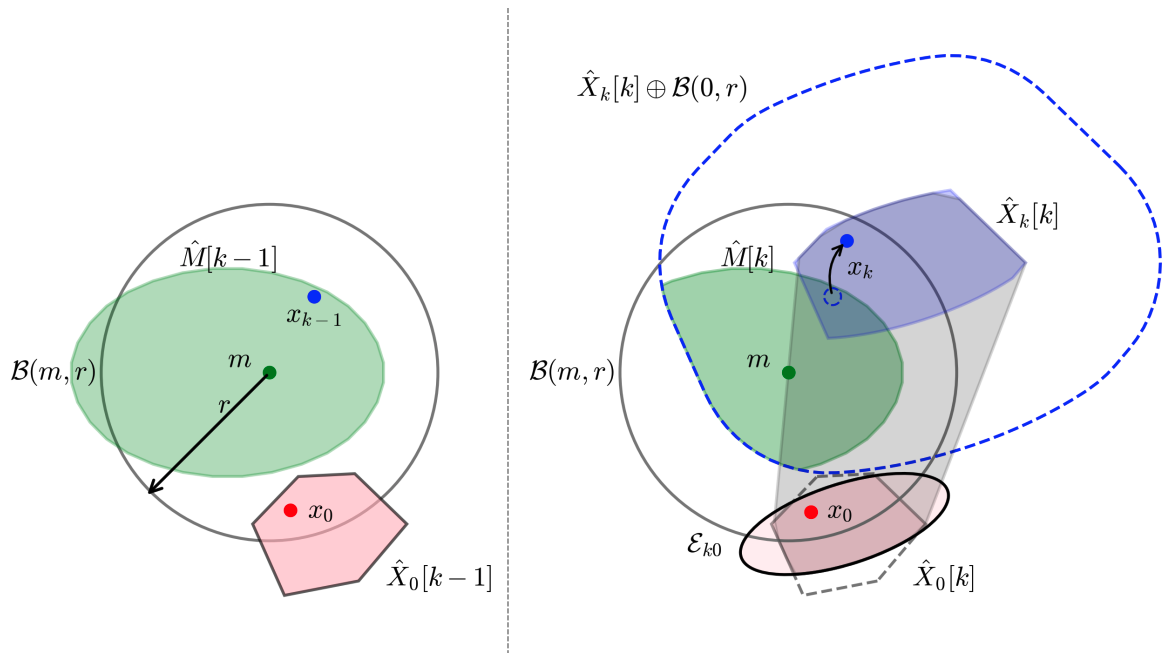
Active Localization of Unstable Systems with Coarse Information
Ege Yuceel, Daniel Liberzon, Sayan Mitra ACM International Conference on Hybrid Systems: Computation and Control (HSCC), 2026 (Best Paper — Foundations Track) paper Active localization of unstable linear systems from coarse, quantized measurements, with soundness and completeness guarantees on the recovered localization set. |
|
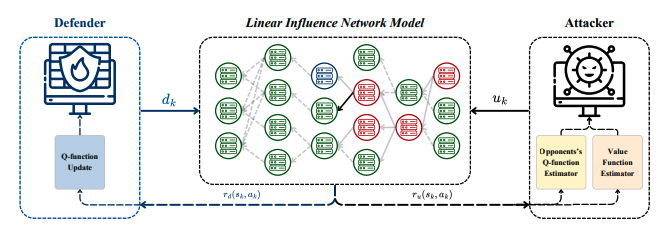
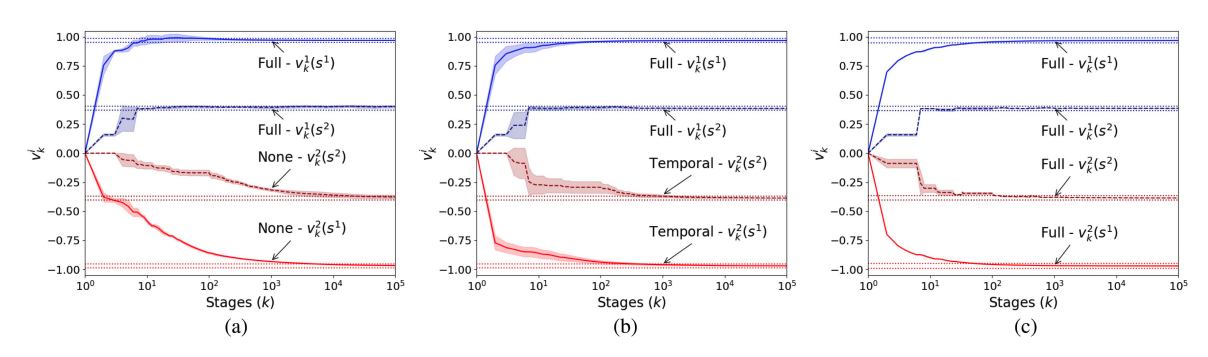
Omniscient Attacker in Stochastic Security Games with Interdependent Nodes
Yuksel Arslantas, Ahmet Said Donmez, Ege Yuceel, Muhammed O. Sayin IFAC World Congress, 2026 paper Stochastic security games over interdependent nodes modeled as a linear influence network, analyzing an omniscient attacker against a learning defender. |
|
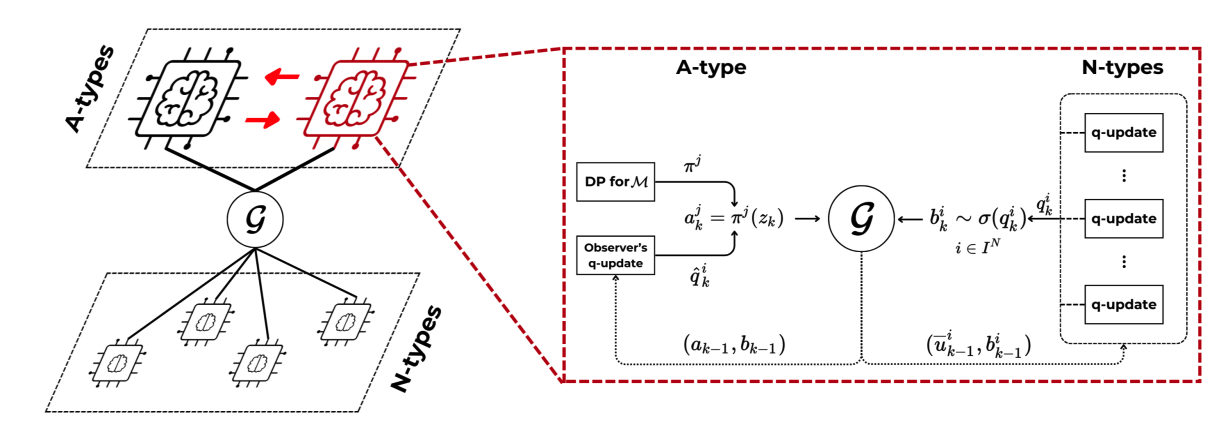
Convergence of Heterogeneous Learning Dynamics in Zero-sum Stochastic Games
Yuksel Arslantas, Ege Yuceel, Yigit Yalin, Muhammed O. Sayin IEEE Transactions on Automatic Control (TAC), 2025 paper Convergence analysis of heterogeneous learning dynamics, where agents run different update rules, in zero-sum stochastic games. |
|
Strategizing against Q-learners: A Control-theoretical Approach
Yuksel Arslantas, Ege Yuceel, Muhammed O. Sayin IEEE Control Systems Letters (L-CSS), 2024 paper A control-theoretical framework for a strategic agent to exploit and steer Q-learning opponents toward favorable outcomes. |
|
The source code of this website has been taken from here. |